













Ustedes desarrollarán el robot que usarán ellos, para aprender a programar con el software mBlock.
Y serán los encargados de desarrollar todo el material gráfico que ellos necesitarán para estudiar y aprender.
Organización de los equipos de trabajo:
Cada grupo estará integrado por 7 personas que asumirán diferentes roles:
- Organizador: responsable del kit, organiza el equipo como un/a pequeño/a líder y es un mediador en la función de los otros roles.
EQUIPO DE CONSTRUCCIÓN:
- Constructor: responsable de ensamblar las piezas del robot y de mostrar al resto cómo se realiza.
- Asistente de constructor: debe observar y apoyar al constructor.
EQUIPO DE PROGRAMACIÓN:
- Programador: encargado generar los bocetos necesarios para el funcionamiento del robot.
- Asistente de programador: debe observar y apoyar al progrador.
EQUIPO DE REDACCIÓN:
- Redactor: encargado de registrar en forma textual, fotográfica y en video, todo lo desarrollado.
- Asistente de redactor: debe apoyar al redactor.

El EQUIPO DE CONSTRUCCIÓN será el encargado de armar el mBot.
El EQUIPO DE PROGRAMACIÓN, deberá investigar la diferencia entre un motor de corriente continua y un servo motor. Y deberá experimentar su funcionamiento con la placa Arduino y la protoboard.
El EQUIPO DE REDACCIÓN, deberá llevar un registro de todo el proceso de construcción y las actividades desarrolladas por el equipo de programación.
El organizador tendrá la ARDUA tarea de supervisar que todo marche según lo planificado.
ESTARÁN VIVENCIANDO LO QUE ES UN VERDADERO TRABAJO EN EQUIPO.
Pasos para el armado del mBot
PRIMERA ETAPA:
1) Abrir la caja y retirar los primeros componentes



2) En este paso trabajaremos con la carcasa azul, los dos motores de corriente continua, 4 tornillos, 4 tuercas y el destornillador.
Fijaremos primero uno de los motores y luego el otro.







SEGUNDA ETAPA:
3) En el siguiente paso se agregará al dispositivo, el sensor seguidor de líneas junto con la mini-rueda. Se usarán dos tornillos.



4) En el siguiente paso se agregará al dispositivo, el sensor de redirección ultrasonido, que es un detector de proximidad que detectan objetos a distancias que van desde pocos centímetros hasta varios metros. El sensor emite un sonido y mide el tiempo que la señal tarda en regresar.



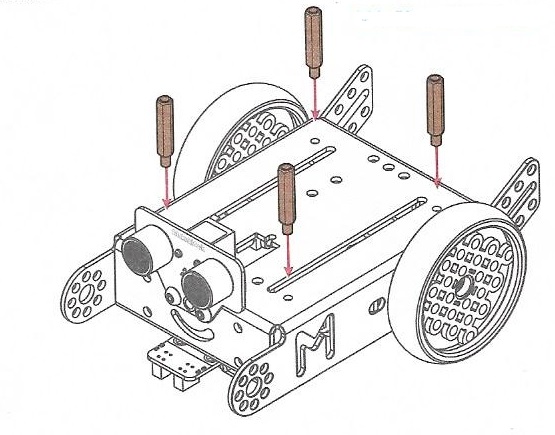
5) En el siguiente paso se agregará al dispositivo, los 4 pernos dorados.


6) En el siguiente paso se conectarán los cables de red: uno al sensor de redirección ultrasonido y el otro al sensor seguidor de líneas



7) En el siguiente paso se pegará a la carcasa, el portapilas, utilizando la cinta bifaz.



8) En el siguiente paso se atornillará a los pernos dorados la placa.

9) En el siguiente paso se conectarán los cables de red y los cables conectores a la placa:






0 comentarios:
Publicar un comentario